
Sitemap
A list of all the posts and pages found on the site. For you robots out there, there is an XML version available for digesting as well.
Pages
Posts
Future Blog Post
Published:
This post will show up by default. To disable scheduling of future posts, edit config.yml and set future: false.
Blog Post number 4
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 3
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 2
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 1
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
projects
Luxo Jr. - The Robotic Lamp (6-DoF Interactive Platform)
A 6-DoF robotic lamp that senses and responds to human presence. Built on ROS 2 and powered by 3D perception, this project explores how expressive motion can emerge from minimal robotic embodiment.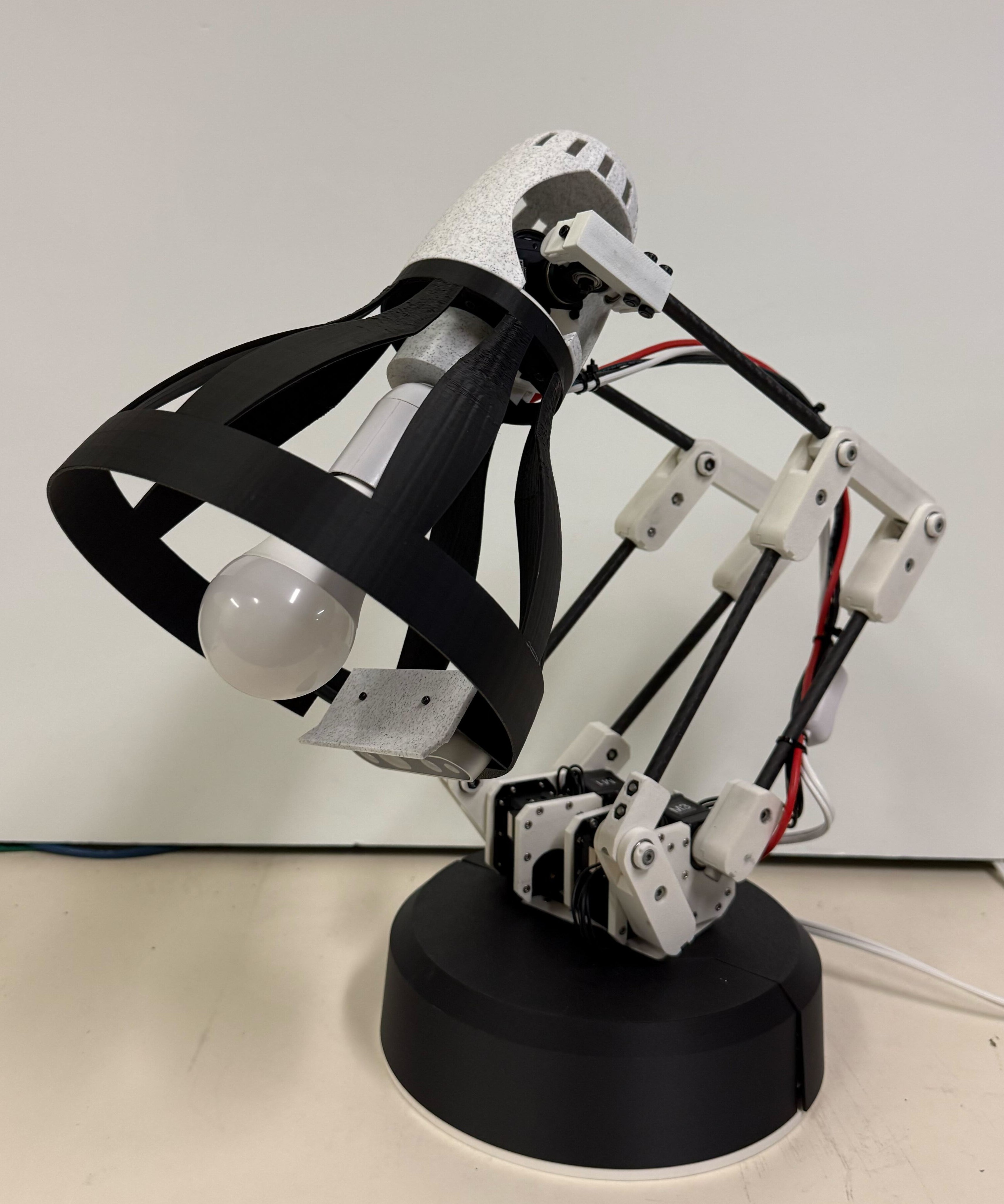
The infant Cardiac Robotic System (iCROSS)
A unique robotic system with fourteen degrees of freedom (DoFs) designed to meet the stringent requirements of infant cardiac surgery–an application rarely explored in existing medical robotics research.
Tron Dance
A project for a performance in EE Night 2019
The Box Spider
A 12-axis quadruped robot features a compact, foldable design, allowing it to reduce its footprint when needed; the robot is designed for field missions
The UarmBot
An 8‑axis quadruped robot integrated with a 5‑axis robotic arm, aiming at performing general tasks
Splat.io
A fun online io game. Go splash colors and battle with others!
publications
intraOcular RoBotic Interventional System (iORBIS): Mechanical design for distally-actuated instrument insertion and automatic tool change
Published in Mechanism and Machine Theory, 2022
A novel parallelogram-based remote center-of-motion (RCM) mechanism for intraocular surgical robots, enabling distally-actuated instrument insertion and retraction to reduce volume and mass on the patient side.
Recommended citation: C. ‑W. Chen, H. ‑C. Chen, H. ‑Y. Yang, X. ‑Y. Zeng, X. ‑H. Wu, and P. ‑C. Chen, “intraOcular Robotic Interventional System (iORBIS): Mechanical Design for Distally‑Actuated Instrument Insertion and Automatic Tool Change,” Mechanism and Machine Theory, vol.167, p. 104568, 2022.
Download Paper
Design and Evaluation of the infant Cardiac Robotic Surgical System (iCROSS)
Published in IROS, 2022
A unique system with fourteen DoFs in total to meet the strict requirements for infant cardiac surgery, an application rarely explored by existing medical robotic research.
Recommended citation: P. ‑C. Chen, P. ‑A. Hsieh, J. ‑Y. Huang, S. ‑C. Huang and C. ‑W. Chen, ”Design and Evaluation of the infant Cardiac Robotic Surgical System (iCROSS),” 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022, pp. 413‑418, doi: 10.1109/IROS47612.2022.9981503.
Download Paper
talks
Talk 1 on Relevant Topic in Your Field
Published:
This is a description of your talk, which is a markdown file that can be all markdown-ified like any other post. Yay markdown!
Conference Proceeding talk 3 on Relevant Topic in Your Field
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.