
The infant Cardiac Robotic System (iCROSS)
Chen is responsible for initiating the new kinematics design, overall mechanism development, and mechatronics integration. Additionally, the system is equipped with two six-degree-of-freedom joysticks for remote manipulation.
The robot features two linear joints, allowing the arms to operate closely together, as shown in the following figure: 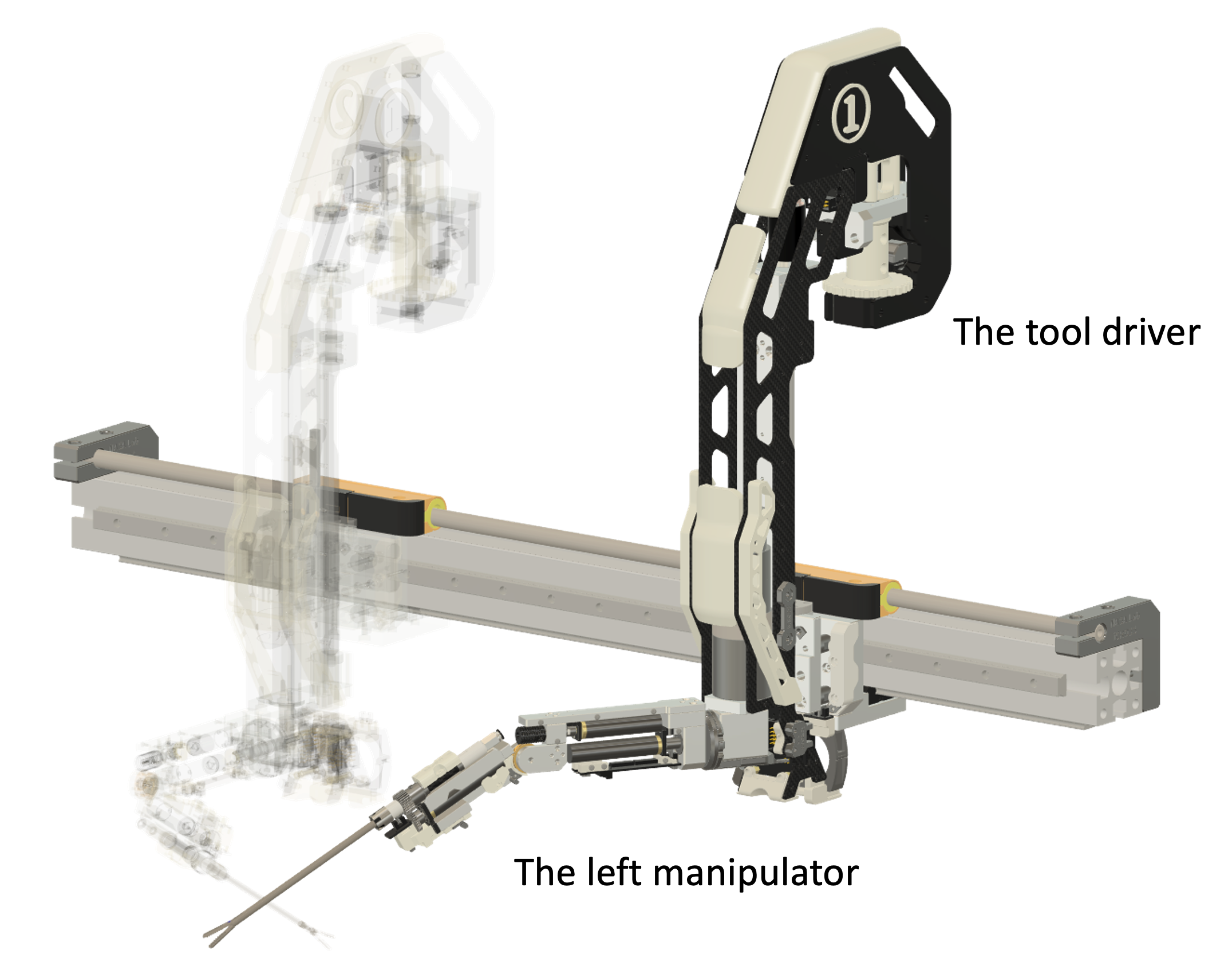
The detailed kenimatics is shown here: 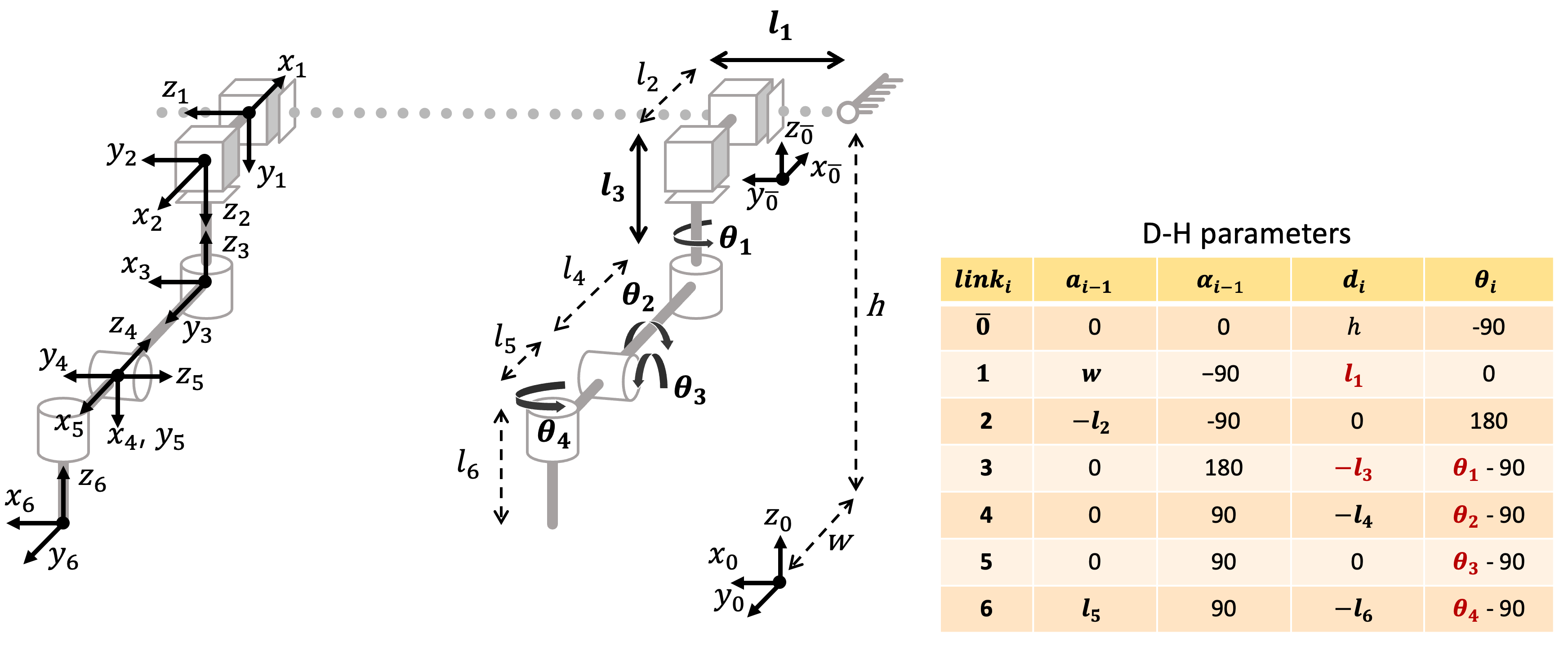
A carefully designed spatial arrangement is also key to the compact footprint of the manipulators, as demonstrated in the figure below: 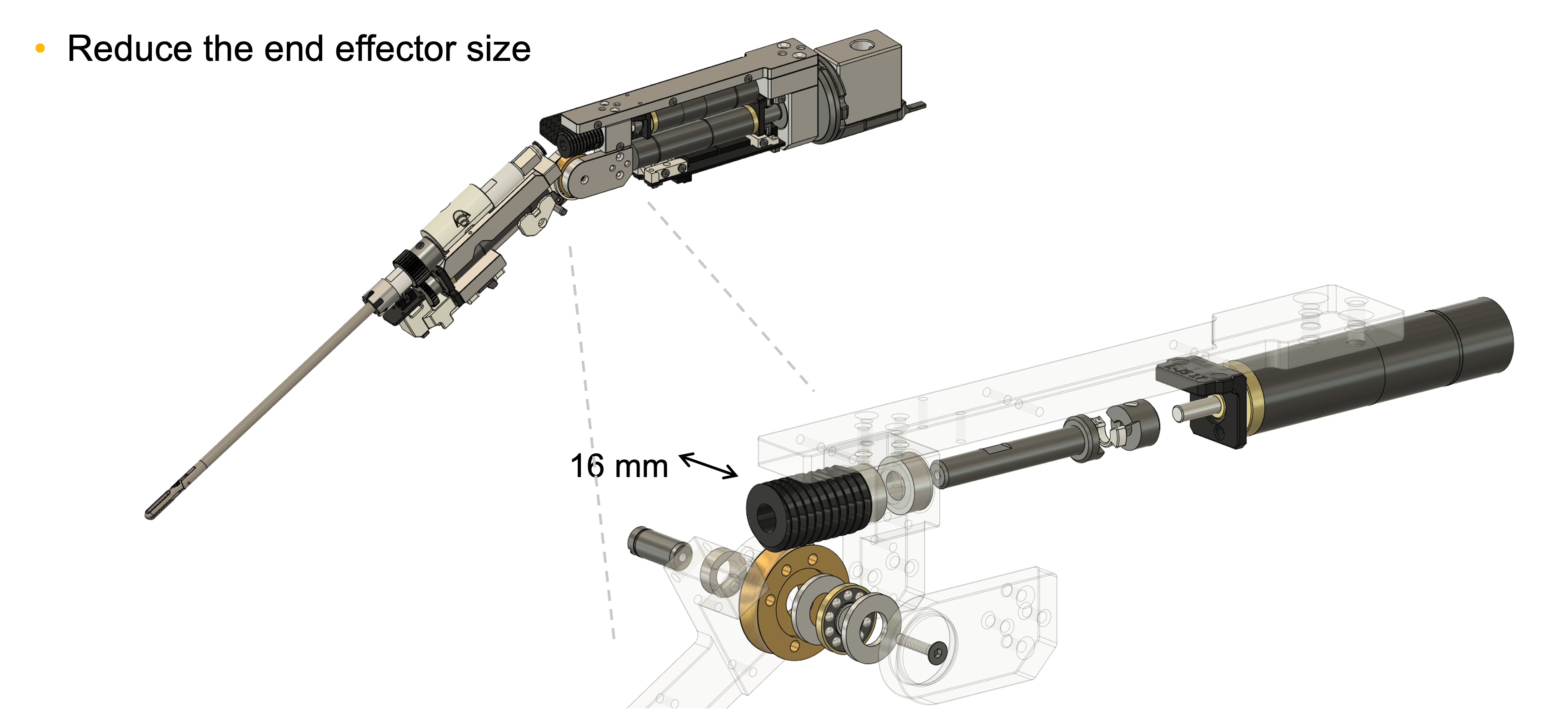
Dissection Task Demonstration
This demonstration showcases a dissection task where both robotic arms must collaborate in close proximity.
Publication
This work was published at IROS 2022. You can access the publication here.
In this study, the Infant Cardiac Robotic Surgical System (iCROSS) was developed to assist surgeons in performing patent ductus arteriosus (PDA) closure and other infant cardiac procedures. The iCROSS is a dual-arm robotic system designed to allow two surgical instruments to operate collaboratively in a constrained surgical field while maintaining a sufficiently large workspace.
Compared to existing surgical robotic systems, iCROSS is specifically tailored to the requirements of infant cardiac surgery. Its feasibility has been validated through multiple teleoperated experiments, successfully demonstrating surgical ligation within one minute.